
Risk-Aware Decision-Making & Autonomy Under Uncertainty for Space Exploration
Ingenuity Mars Helicopter Pilot - Mars 2020
Safe autonomous flight planning to achieve science objectives while adhering to mission safety constraints under uncertainties



Ingenuity Mars Helicopter is the first aircraft to achieve powered, controlled flight on another planet, a feat that’s been called a “Wright Brothers moment”. Ingenuity Mars Helicopter completed 72 historic flights since first taking to the skies above the Red Planet.
-
JPL Voyager Award, 2023
Outstanding contributions to Mars 2020 Ingenuity Helicopter's flight planning, execution, and analysis to successfully complete the ambitious flight campaign. -
NASA Award, 2024
NASA Group Achievement Award - The Ingenuity flight planning team (GNC + Science) | For outstanding group achievement in planning and finely executing the Ingenuity spacecraft on over 50 flights on Mars! -
JPL Voyager Award, 2024
Ingenuity GNC Planning -
JPL Team Award, 2024
Ingenuity Mars Helicopter - For exceptional implementation of the Ingenuity Mars Helicopter campaign, commanding 72 flights through the skies of Mars.



Risk Aware Integrated Task and Motion Planning for Versatile Snake Robot (EELS) under Localization Failures for Ice/Ocean World Exploration




-
JPL Team Award, 2024
For the remarkable technical achievements in creating and successfully testing first-of-a-kind robotic system that could enable icy world ocean access.


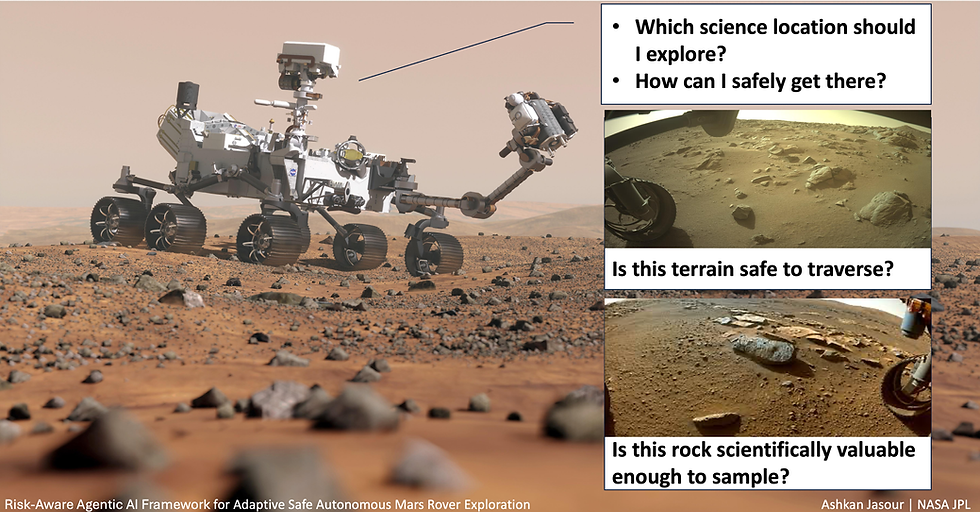
Risk-Aware Agentic AI Framework for Adaptive Safe Autonomous Mars Rover Exploration
To balances reward, risk, and cost during exploration to guide sample collection.
Resilient Risk Aware Planning for Lunar and Martian Mixed Mobility Exploration
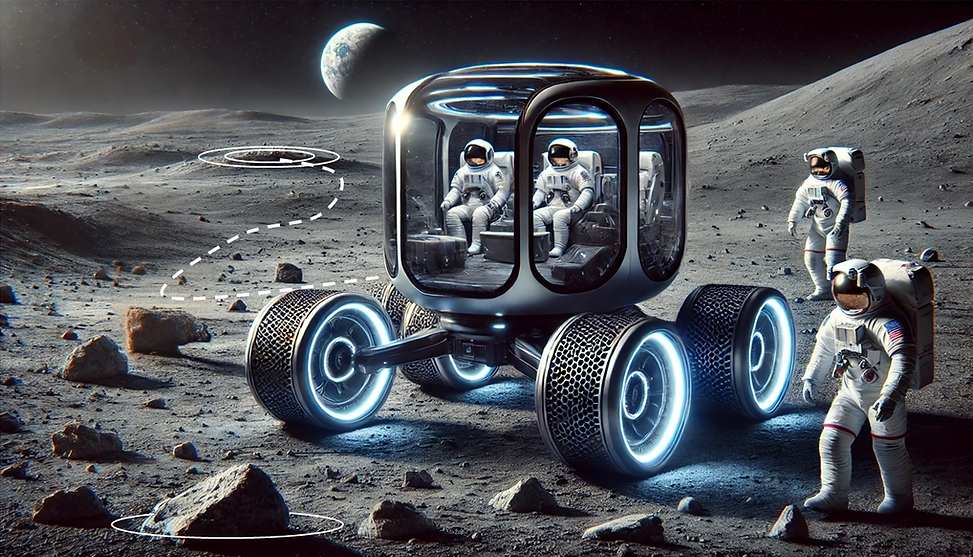
The goal of this work is to develop safe autonomy for crewed lunar and Martian mixed-mobility exploration. This exploration includes the use of different vehicles, such as pressurized rovers and lunar terrain vehicles (LTVs), as well as extravehicular activities (EVAs) conducted by astronauts outside these vehicles like ambulation and sample collections. The mission goal will be to collect samples from multiple locations, which may change during an extravehicular activity as samples are analyzed or the crew spots targets of opportunity. The proposed safe autonomy architecture will support real-time planning for vehicles and crew activities in the presence of sources of risks and uncertainties such as life support, crater proximity, shadows, terrain slope, communication coverage, traverse and activity execution time, terrain traversability and mobility system drifts. The developed risk-aware planner will proactively balance science return and risk to prevent behaviors that are overly conservative.
Scenario: The planner will receive an initial list of science locations for sample collections from mission control as well as mission constraints, such as available time and available consumables like battery and oxygen for Astronauts. Based on the available resources and considering uncertainties and risks, the planner will choose the science locations to visit from the given list. It will then generate safe traverse plans including trajectories for the vehicles to reach the targets while considering constraints imposed by the vehicle such as max velocity and safe terrain slope as well as risks such as the potential vehicle drifts over rough terrain, localization uncertainties due to shadow, and sensor noises when determining the locations of obstacles and hazards. The Planner will also generate schedules for different science activities considering the temporal constraints and inherent uncertainties in the duration of these activities and their uncertain outcomes. For example, the time that astronauts want to spend at each science site will vary depending on their observations. Besides risk-aware planning, the planner will estimate and monitor the probability of failure of activities at execution time, and dynamically respond and adapt to changing conditions by updating the risk-bounded plans and schedules as new information becomes available. This ensures that the risk-bounded plans remain optimal, safe and effective in dynamic and uncertain environments. For example, When the planner receives the location of a new science target from mission control, it promptly updates its plans to incorporate this new location. The updated plan aims to reach as many of the identified science targets as possible; Hence maximizing the science return, efficiency and effectiveness of the mission; Or the planner will monitor the localization uncertainty of the vehicle while driving. When localization uncertainty and risk due to crater proximity increase, planner will execute uncertainty and risk minimizing activities such as driving slower and increasing scanning frequency to improve vehicle localization.
Algorithms for Operations of Autonomous Spacecraft
